

Neq6 Home Position
Uno degli aspetti meno trattati nel web riguardanti le montature GoTo senza encoder (come ad esempio al Neq6 Pro) riguarda la Home Position
Nella Neq6 Home Position (o posizione iniziale) è quella in cui si trova il telescopio PRIMA dell’accensione del Synscan, ed ha una sua dinamica ben precisa che ho individuato dopo numerosi oggetti non centrati in seguito alla calibrazione delle stelle.
Il concetto di base che deve essere compreso è questo: il synscan possiede all’interno del suo database le coordinate J2000 degli oggetti. Queste coordinate sono state rilevate universalmente e corrispondono a (cit.Wikipedia)
In astronomia, la dicitura J2000.0 (o anche J2000) identifica il mezzogiornoUT del 1º gennaio 2000 relativo al calendario gregoriano ovvero il 2.451.545º giorno giuliano.
Ora, ci sono i moti di precessione della terra giusto? Quindi le coordinate rilevate in quel preciso istante nell’anno 2000, non corrispondono precisamente alla posizione degli oggetti di oggi. Quindi il database va “riallineato”. Il “riallineamento” lo eseguiamo inconsciamente ogni volta che noi eseguiamo l’allineamento a una o piu stelle (oltre a correggere le aberrazioni della montatura e dell’allineamento polare, ma concentratevi sul concetto alla base per il momento)
Quindi, riassumendo, quando confermiamo di trovarci su una stella in fase di allineamento, non facciamo che “reimpostare” i riferimenti delle coordinate degli oggetti e “spostare” tutto il riferimento del cielo che avviene attraverso un calcolo che possiamo descrivere in maniera testuale in questo modo:
Dialogo semiserio tra il synscan (contiene il database) che parla alla scheda motori (che invia le coordinate) che parlano male dell’astrofilo:
Synscan: “Ciao, senti…sono Synscan mi dici che coordinate hai?”
Scheda motori: “si ciao..dunque io penso che il tizio abbia messo il telescopio verso la polare. Comunque che l’abbia fatto o meno m’importa ‘na sega..toh, le coordinate sono in AR (*orario polare*) mentre in Declinazione ho 90.00.00″
Synscan “Bene..allora, ascolta..il tizio qua ha detto che dobbiamo puntare la Arturo per allinearci…devi andare a queste coordinate xx.xxx.xxx in AR e yy.yyy.yyy in Declinazione“
Scheda Motori “Ottimo..mi muovo…” (rumori di ferraglia insopportabili…)
Scheda Motori “Ok ho fatto, dovremmo essere su arturo!”
Synscan “No…non ci siamo..il tizio sta agendo sulla pulsantiera, spetta…ok…adesso ha detto che ha la stella al centro dell’oculare”
Scheda Motori “bene..io leggo uno spostamento di circa 1 grado dalle coordinate di prima. eccoti le nuove coordinate xx.xxz.xx in Ar e yy.yyy.yyyy” in declinazione”
Synscan “Grazie, un attimo che mi ricreo la posizione di tutti gli oggetti….fatto. Ho spostato il cielo di un grado. Adesso vediamo che cosa vuole ancora sto cavolo di astrofilo…ci sentiamo dopo…”
Scheda Motori “ok”.
Questo avviene al momento dell’allineamento. Come si può intuire, la posizione iniziale diventa non solo importante, ma basilare!
Perchè è importante questa posizione?
La posizione iniziale è particolarmente importante per un motivo parecchio semplice: siccome la scheda motori non è dotata di encoder, al momento dell’accensione il synscan si avvia con le coordinate in posizione “zero”. Nel dettaglio, i programmatori hanno previsto che al momento dell’accensione la montatura si trovi con l’asse di AR posto con la barra contrappesi perfettamente perpendicolare al terreno, e con l’asse di DEC perfettamente allineata al centro.
Infatti, se volete fare una prova, accendete la montatura, impostate l’orario e le coordinate corrette e andate nel menu Utility – Show Position

In questo menu vengono visualizzate le coordinate in cui si trova il telescopio. All’accensione, questi valori sono:
- Per l’asse di AR, l’angolo Orario ricavato dall’orario impostato allo startup
- Per l’asse di Dec, 90°.00.00 che sarebbe l’angolo di declinazione che “guarda”verso la polare.
Da questo deduciamo che per quanto concerne l’avvio, il sistema prevede che il telescopio sia puntato verso la stella polare. Ma è una previsione non verificata, nel senso che sostanzialmente la scheda motori invia queste coordinate al synscan senza sapere esattamente dove sia puntato il telescopio. Non avendo encoder (che registrano il movimento e il posizionamento degli assi), all’avvio le coordinate preimpostate sono cosi interpretabili: “ok, mi hai acceso, sei sulla polare.”. Non te lo chiede se tu lo sei o meno. Lui dà per scontato che tu lo sia 😛
Ovviamente accade che se il telescopio in questa fase non è effettivamente puntato in posizione HOME in maniera precisa, il calcolo di allineamento sballa, e può sballare di parecchio per ovvi motivi: salta la possibilità di riallineare l’intero database ai valori effettivi delle coordinate “apparenti”, e cosi per tutta la sera vi troverete a fare i conti con oggetti non puntati e aprire mille topic in giro nei forum con il titolo “La mia eq6 non punta gli oggetti, oddiooddiooddio adesso muoro.” 😀 lo dico perchè io ne ho aperti una decina.
Come allineare la posizione Home correttamente
Ecco che quindi si fa strada un’azione molto importante da fare PRIMA dell’accensione della montatura: regolare la posizione HOME.
E’ parecchio semplice, ma consiglio di farla bene almeno le prime volte, dopodichè una volta abituato l’occhio verrà sempre piu facile (immagini prelevate da documentazione reperibile online):
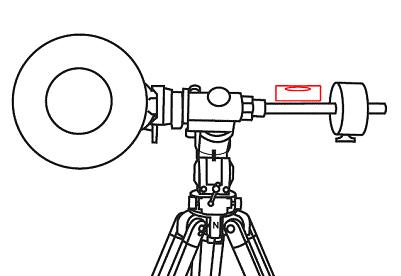
a) Sganciare le frizioni dell’asse di AR, e ruotare in senso antiorario li telescopio fino a posizionarelo con la barra contrappesi parallela al terreno. Deve essere PARALLELA, quindi può essere utile anche avvantaggiarsi di una bolla.
b) Chiudere le frizioni con il telescopio in questa posizione, andare nel cerchio graduato di AR e impostare ZERO nell’indicatore
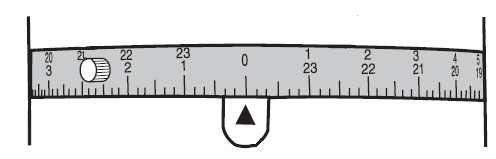
c) stringere i fermi del cerchio graduato, allentare le frizioni e ruotare l’asse di AR fino a raggiungere ore 6 sull’indicatore delle ore nella scala in basso del cerchio graduato di AR
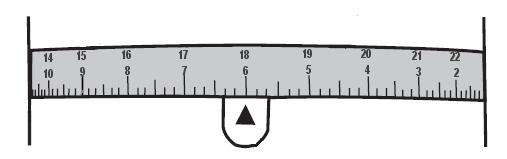
d) bloccare le frizioni di Ar
e) Allentare le frizioni della declinazione e porre il telescopio perfettamente in bolla in questa posizione, fino a che l’asse non si trova in bolla:
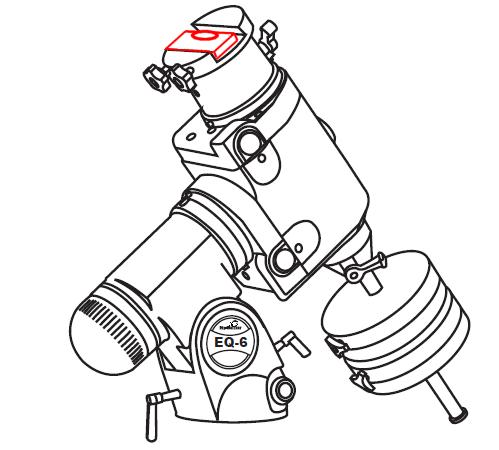
f) Ruota il cerchio graduato di DEC fino a che non viene segnato l’angolo di 90°
g) Ruota l’asse di DEC fino a che il cerchio graduato non segna il valore Zero – “0”
A questo punto avrete ottenuto una corretta posizione Home, all’accensione il telescopio sarà posizionato correttamente con una corrispondenza con i valori standard dell’avvio e siete pronti per un allineamento corretto e per un’utilizzo migliore del synscan.

Queste informazioni le avevo solo intuite, con molta incertezza. Finalmente qualcosa di chiaro! Almeno per questa parte di dubbi non ne ho più grazie a te.
Cordialmente
Grazie, i commenti come il tuo mi fanno molto piacere. Per qualsiasi eventuale dubbio o integrazione, chiedi pure. 🙂
Caro Fabio,
il metodo da te indicato per posizionare correttamente in home la montatura è perfetto. Io, per esempio l’ho sempre trascurato, limitandomi a posizionare ad occhio la montatura sul cavalletto. Però, mi viene un dubbio che mi piacerebbe tu mi dissipassi. Si tratta di questo: corretto il tuo metodo, ma, prima di procedere alla sua applicazione, penso che la montatura debba essere posizionata sul cavalletto in maniera che la sua semicurva di base, sia simmetrica alla semicurva del cavalletto, in corrispondenza della quale la montatura viene posata. Cerco di spiegarmi meglio: nel posare la montatura sul cavalletto, penso si debba essere sicuri che essa si trovi giusto nel mezzo dei due canali di escursioni, uno a destra e l’altro a sinistra, in cui si svolge il gioco di spinta delle due manopoline azimutali. Voglio cioè dire che queste due manopole devono poter agire in pari sul perno controspinta ed essere fissate bene, contro il perno stesso, in modo che la base della montatura risulti “diritta” rispetto alla semicurva del cavalletto. Solo allora si può passare alla messa in home della montatura con il tuo metodo. Temo di non essere riuscito a spiegarmi bene e che tutto questo mio discorso non conti una cicca. Se è così scusami e cestinalo. Comunque ti invio i miei migliori saluti.
Gianantonio
Caro Fabio,
ho postato una mia osservazione, forse stupida, ma mi piacerebbe sentirlo dire da te, e altri due topic, rispettivamente su qualità delle ottiche dei tele e su altro argomento che non mi ricordo.
Mi aspettavo una risposta, con la correzione di eventuali miei errori, ma non ne ho ricevuta nessuna. Forse sono io che uso male il settore dedicato ai commenti. Se è così gradirei un messaggio specifico sul mio indirizzo postale che figura qui sopra.
Se potete farlo ve ne sarò molto grato.
Cordiali saluti.
Caro GianAntonio
ti chiedo sempre di considerare l’autore (io) un neofita in questo campo soprattutto nelle argomentazioni che metto a suffragio dei miei articoli. 😀
a mio parere, rispettare il tuo criterio riguardante la semicurva è sicuramente un’accortezza in piu che considerando la precisione richiesta da questa passione in ambito astrofotografico non fa che aumentare la precisione dei puntamenti. Tuttavia non lo ritengo fondamentale, a patto però di aver capito bene il tuo punto di vista. Sostanzialmente, quando un asse è in bolla, lo è a prescindere da come è “sbilanciato” il perno di destra rispetto a quello di sinistra. Sostanzaialmente ritengo che partendo da una polare correttamente allineata, la home venga di conseguenza prescindendo dal reale scostamento dei perni di azimuth tra il punto centrale. L’importante, questo si, è fissarli bene. A suffragio comunque del tuo punto di vista, ho notato che fare il PNC a occhio avendo le manopole di azimuth diversamente avvitate, rischia di rivelarsi un falso positivo. Per questo motivo suggerisco la messa in bolla dei due assi. A rigor di informazione, per quel che riguarda puntamento fotografico o puntamento visuale, penso che non vi siano differenze e se si cerca una precisione “da spaccare il pelo” la posizione home rivesta la stessa importanza in entrambe le attività. Anzi, spingendomi poi nel vero spirito di sessione, si potrebbe azzardare dicendo che la posizione home è ben piu importante nella sessione visuale (dove si fanno diversi goto in una serata) rispetto a quella fotografica (dove si punta un oggetto a notte e si fotografa quello in continuazione per ottenere delle somme corrette)
Fabio,
anche se tu hai fornito ricche spiegazioni sulla questione riguardante la messa in bolla degli assi di una montatura, in sostanza (benché io abbia aggiunto un particolare di scarsa importanza) siamo sulla stessa linea: quasi superflua infatti la coincidenza delle due semicurve appartenenti alla base della montatura e alla sommità del cavalletto, già rivolto a nord se le due manopoline in azimut sono ben strette e non concedano slittamenti durante le operazioni di puntamento con Go To.
Per una certa analogia, mi ricordo l’affermazione di un astrofilo, che diceva non avere alcuna importanza la perfetta posizione parallela al terreno del cavalletto e della montatura, per un corretto puntamento di questa al Nord. In sostanza egli sosteneva che in qualsiasi posizione la montatura si trovi, o distesa, o capovolta, o sottosopra o non so come ancora, quando il cannocchiale polare punta esattamente il PNC il funzionamento Go To sarà sempre esatto, perché le coordinate degli oggetti sono sempre quelle. Anche se stravolgente, ritengo che l’affermazione sia vera. Noi tutti, però, curiamo la perfetta postazione di cavalletto e montatura, perché ci torna maledettamente logico e perché i motori non soffrano per qualche sbilanciamento che posizioni squilibrate provocherebbero.
Mi fermo, perché altrimenti non la smetterei più, e scusandomi per essere logorroico, ti saluto cordialmente.
Gianantonio
Ma no perchè smettere? 😀 Siamo qua per questo, nella passione che ci unisce ed è interessante scambiare opinioni.
Penso che l’affermazione del tuo amico sia possibile sviscerarla meglio. Ha ragione se dice che la montatura può essere stazionata al polo anche non avendo piani paralleli tra montatura e terreno, ma non concordo sulla “libertà” del posizionamento se si utilizza un sistema go-to. In buona sostanza, la c.d. posizione “home” è vitale dal momento che il contaggio degli step dei motori avviene prendendo a riferimento una posizione precisa da cui iniziare a contare. Esempio se dalla posizione home all’oggetto X ci sono 10 step di motore, la non corretta posizione home falsa il posizionamento. Immaginiamo di avere la posizione home spostata di 1 grado, aggiungendo i 10 step necessari al goto per raggiungere l’oggetto, il conteggio porterà la montatura ad un effettivo “11” e non a “10” con conseguente errore di puntamento.
E’ un piacere discutere in questi toni e con questo metodo, ti faccio i complimenti per la gentilezza e l’interessamento!
Fabio
In effetti Fabio, precisata come hai fatto tu, l’affermazione di quell’astrofilo zoppica alquanto. Ritengo però che sia stata fatta più come provocazione e meno con convinzione. Anch’io che, pur con fatica mi ero lasciato convincere, ora, alla luce della tua spiegazione devo ricredermi.
Grazie Fabio, e, come sempre, carissimi saluti.
Gianantonio
Ciao l ho trovato molio utile ma la livella deve essere messa sulla baera dei contrappesi o sulla montatura?
Ciao a tutti!! Volevo chiedere se questo metodo vale anche per l’ HEQ 5 ?
Grazie per la risposta e un saluto a te Astrofilo Neofita per gli articoli che scrivi.
Ciao a tutti!!
RINGRAZIO per l’articolo e faccio una domanda banale. La procedura presuppone che il puntamento alla polare della montatura, con il cannocchiale polare, sia già stato fatto, giusto?
Si per forza perchè la Eq6 per fare il polare devi spostarla dalla posizione home, altrimenti non avrebbe senso fare prima la home e poi spostare la home per fare il polare per rimetterla nuovamente in home. Prima fai la polare, fatta quella fai la home e inizi la tua sequenza di lavoro.